Berechnungen zur Funktionalen Sicherheit
Größen, Formeln und Methoden
3 Mittlere Ausfallrate und mittlere Zeit bis zum Ausfall
Bei vielen Komponenten ist die Ausfallrate stark zeitabhängig. Auch für solche Komponenten wird oft eine mittlere Ausfallrate benötigt, unter anderem aus folgenden Gründen:
-
• Sollen Systemgrößen (
-
• Wenn eine Komponente während der Einsatzzeit des Systems wahrscheinlich mehrfach ausfallen (und ersetzt oder repariert werden) wird, ist ab dem ersten Ausfall auch die Ausfallratenfunktion selbst eine Zufallsgröße, die mit zunehmender Anzahl von Ausfällen immer unschärfer wird. Selbst bei transienten, also zeitlich kontinuierlich aufgelösten Betrachtungen, kann also keine Ausfallratenfunktion angegeben werden.
-
• Falls die Komponente regelmäßig präventiv getauscht werden soll, damit sie möglichst nicht ausfallen wird, stellt sich die Frage, in welchem Intervall die Komponente getauscht werden sollte, um die effektive (Rest-)Ausfallrate und damit die Wahrscheinlichkeit eines Ausfalls möglichst gering zu halten.
In diesem Abschnitt sollen daher die folgenden Aufgaben behandelt werden:
-
1. Wie groß sind MTTF und mittlere Ausfallrate für den Fall, dass die Komponente bis zum Ausfall betrieben wird und dann getauscht wird? (Beispiel: Glühbirne)
-
2. Was groß sind MTTF und effektive mittlere Ausfallrate für den Fall, dass die Komponente regelmäßig präventiv getauscht wird? (Beispiel: Steuerriemen eines Verbrennungsmotors)
-
3. Wenn es gefährliche und ungefährliche Ausfallmodi einer Komponente gibt: Wie können die gefährliche MTTF und die gefährliche mittlere Ausfallrate für die beiden vorgenannten Fälle berechnet werden?
Häufig wird behauptet, man solle bei derlei Fragestellungen die Ausfallrate im flachen Bereich der „Badewannenkurve“ verwenden. Dies ist jedoch nur dann richtig, wenn die Komponente auch wirklich nur in diesem Bereich betrieben wird, also Frühausfälle (insbesondere Produktionsfehler) ebenso absolut ausgeschlossen werden können wie Ausfälle durch Alterung und Verschleiß. Diese Bedingungen sind sehr häufig nicht erfüllt – und zudem weist die Badewannenkurve oft auch gar keinen richtig flachen Bereich auf, sondern sogenannte Frühausfälle überlagern sich mit Spätausfällen.
Anmerkung: Mancher Leser wird sich fragen, warum die Abkürzung MTTF auch für die Zeit zwischen zwei Ausfällen verwendet wird, und nicht etwa MTBF (Mean Time Between Failures). Die Antwort ist einfach, dass fast immer, wenn von MTBF die Rede ist, tatsächlich die MTTF gemeint ist. In Anwendungen oder Berechnungen, in denen Fehlerdetektionszeiten oder Reparaturzeiten nicht unerheblich sind, müssen diese ohnehin ausdrücklich erwähnt werden. Es gibt somit weder in der Sicherheits- noch in der Zuverlässigkeitstheorie einen stichhaltigen Grund, eine Größe MTBF einzuführen oder zu verwenden. 2
2 Tatsächlich bin ich nicht sicher, ob ich jemals ein Dokument gesehen habe, in dem der Begriff MTBF korrekt verwendet worden wäre – abgesehen von Lehrbüchern.
3.1 MTTF bei langer Nutzung ohne vorbeugenden Tausch
Zunächst sollen die MTTF und die mittlere Ausfallrate für eine Komponente berechnet werden, welche eine deutlich geringere Lebenserwartung hat als die nominale Einsatzzeit des Gesamtsystems. In dem Fall ist davon auszugehen, dass die Komponente mehrfach ausfallen wird und daher mehrfach getauscht werden muss.
Für beliebige Ausfallverteilungsfunktionen gilt:
Liegen ausreichende Test- oder Felddaten vor, so kann dieses Integral leicht mit einer Tabellenkalkulation berechnet werden. Falls anstelle von
Ganz allgemein gilt für die Ausfalldichtenfunktion
und damit für die MTTF
Fast alle Komponenten haben mehrere Fehlermodi, die unterschiedlichen Ausfallverteilungsfunktionen gehorchen. Angenommen die Ausfallverteilungsfunktionen der einzelnen Fehlermodi seien bekannt, wie kann dann die MTTF berechnet werden?
Dazu muss vorausgesetzt werden, dass die Fehlermodi voneinander unabhängig sind, also sich nicht gegenseitig beeinflussen. Damit diese Voraussetzung erfüllt ist, ist insbesondere notwendig, dass die Komponente im Fall eines
jeden Ausfalls ausgetauscht wird. Dann gilt für die Gesamt-Ausfallratenfunktion
Falls sowohl alle
Die mittlere Ausfallrate der Komponente für den Fall, dass die Komponente wahrscheinlich (mehrfach) ausfallen wird und dann jeweils ersetzt wird, ist der Kehrwert der vollständigen MTTF:
3.2 Vorbeugender Tausch und unvollständige MTTF
Im Falle von vorbeugendem Austausch nach einem Zeitintervall
Mit
Der Kehrwert der unvollständigen MTTF zur Zeit
Dabei meint
-
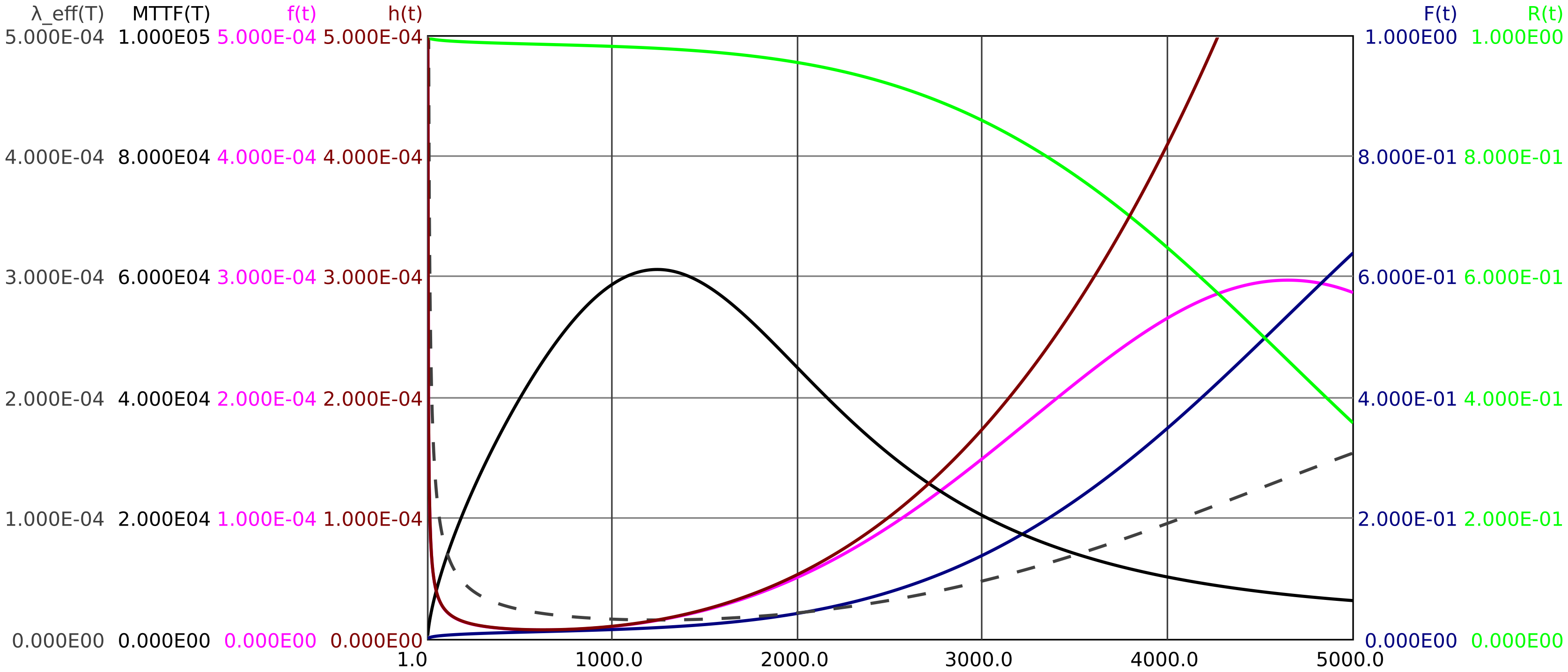
Beispiel 3.1 Die Ausfallrate des Steuerriemens eines Motors eines PKW lasse sich durch zwei überlagerte Weibull-Verteilungen beschreiben:
Dabei beschreibt
Für die Ausfallrate des Steuerriemens gilt gemäß Formel (24):
Weiter sei angenommen, dass ein PKW mindestens 5000 Betriebsstunden wirtschaftlich betrieben werden können soll.
Mit dieser Ausfallratenfunktion errechnet sich die Unzuverlässigkeit zum Zeitpunkt
In Abbildung 7 sind neben Ausfalldichte
Man erkennt, dass bei einer Einsatzzeit
Die effektive MTTF(T) von 61000 h bedeutet bei einem Tauschintervall von 1200 h praktisch, dass etwa jeder fünfzigste (61000 h/1200 h
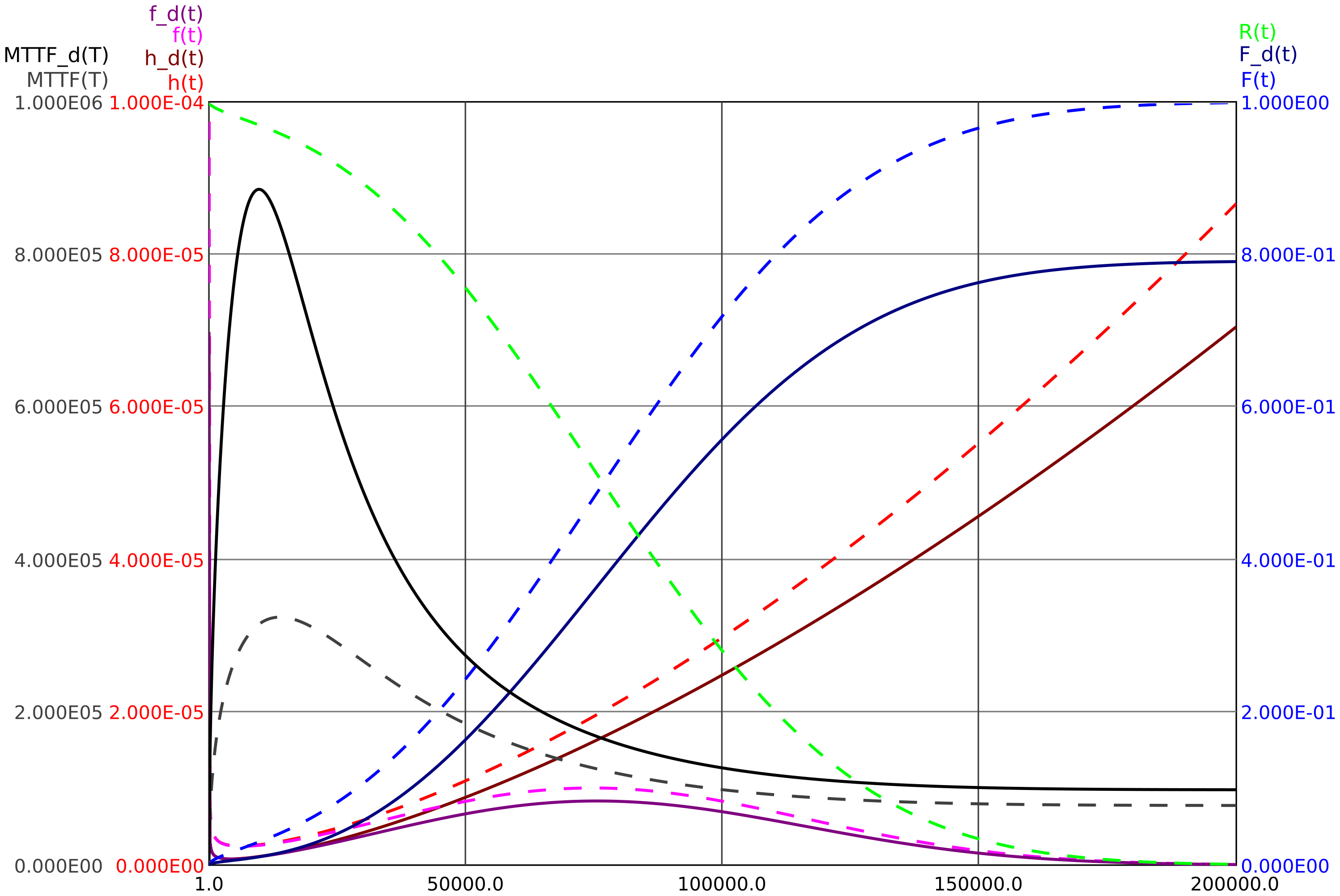
3.3 Gefährliche und ungefährliche Ausfallmodi, gefährliche MTTF
Viele insbesondere komplexere Komponenten können verschiedenartig ausfallen. Dabei sind oft einige Ausfallarten sicherheitskritisch, andere nicht. Für Sicherheitsbetrachtungen ist es daher oft sinnvoll oder erforderlich, zwischen gefährlichen (dangerous, d) und ungefährlichen (safe, s) Ausfallarten zu unterscheiden. Die Gesamt-Ausfallrate zu jeder Zeit t ist die Summe zweier Teil-Ausfallraten für gefährliche und ungefährliche Ausfälle:
Die Dichte kann man über
Entsprechend kann man die Verteilungsfunktion
Aus ähnlichen Überlegungen wie für die unvollständige
Mit den bereits bekannten Formeln für die Beziehung zwischen Zuverlässigkeit und Ausfallrate erhält man eine Formel zur Berechnung von
Auch hier kann man die effektive mittlere gefährliche Ausfallrate
In der folgenden Abbildung 8 sind die für eine Komponente mit je drei gefährlichen und drei ungefährlichen Ausfallarten relevanten Zuverlässigkeitsgrößen dargestellt (durchgezogene Linien für gefährliche Ausfälle, gestrichelte Linien für gesamte Ausfälle):